还在嘴硬?Trie树没你想得那么简单
Trie树,又称前缀树或字典树,在数据结构领域赫赫有名。相信多数人认识Trie的机缘,要么是通过OI,要么是在工作中遇到过Trie发光发热的场景。传统Trie结构并不复杂,但其实现与变种却是八仙过海各显神通。本文从Trie讲起,紧紧抓住核心的性能与空间占用,对Trie主流的几种实现进行了阐述,同时自己也真实地跑一遍benchmark,对各家吹逼的论文去伪存真。
还在嘴硬?Trie树没你想得那么简单
Trie树,又称前缀树或字典树,相信对于大部分业界同仁来说并不陌生。尽管Trie树在数据结构领域称得上赫赫有名,但科班教材却鲜有提及,相信多数人认识Trie的机缘,要么是通过OI,要么是在工作中遇到过Trie发光发热的场景。
对Trie有一定了解的同学,往往会觉着:“不就是一种简单易懂的数据结构吗,有啥好长篇大论的?”实话实说,作为端茶倒水型OI老混子,我也一度这样认为。然而,最近工作中在研究搜索联想词(suggestion)背后的各种索引时,意外的发现Trie大有门道,它的工业级实现也绝不像OI的模板那么随性(只是个演示demo,生产环境没人用)。
本文会从最基础的Trie谈起,围绕性能与空间占用,一步步抽丝剥茧层层递进,对业界知名的几种Trie实现进行详细展开,并尝试解读为什么会这样设计,知其然,并知其所以然。然后,再给出基于业界知名的开源Trie实现库所进行的benchmark数据,并进行分析。最后,对Trie的常见应用以及衍生的数据结构进行介绍。
字典树/前缀树/Trie
顾名思义,字典树,是一个像查字典一样的树形结构,一般来说,我们会选择字符串作为键(key),并非像二叉搜索树那样直接保存到每一个树节点,在字典树中,键会被打散分布于一条树链上。
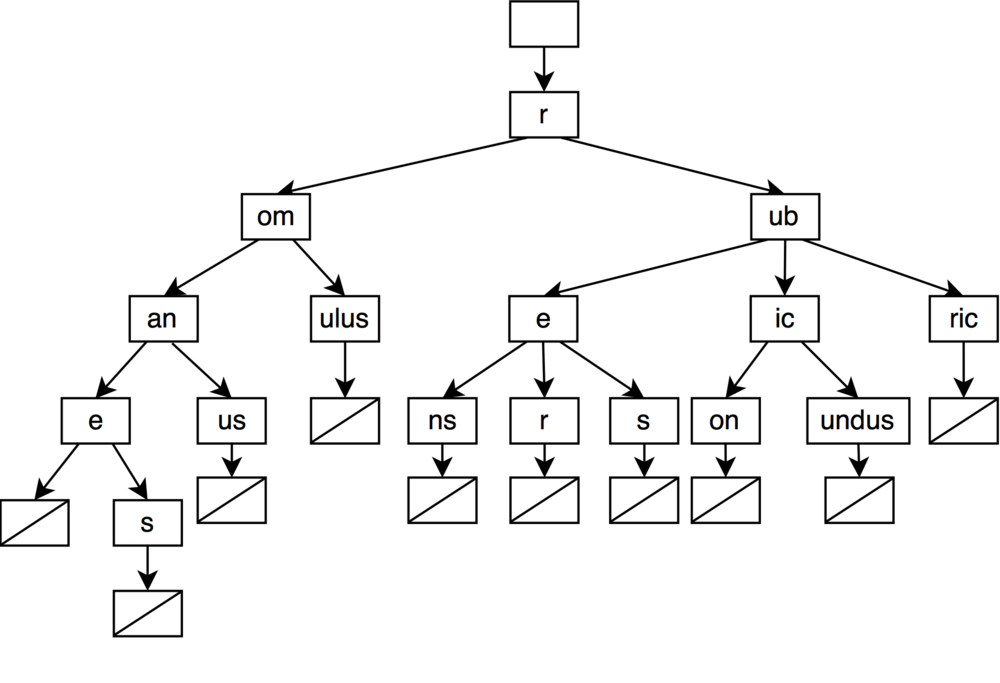
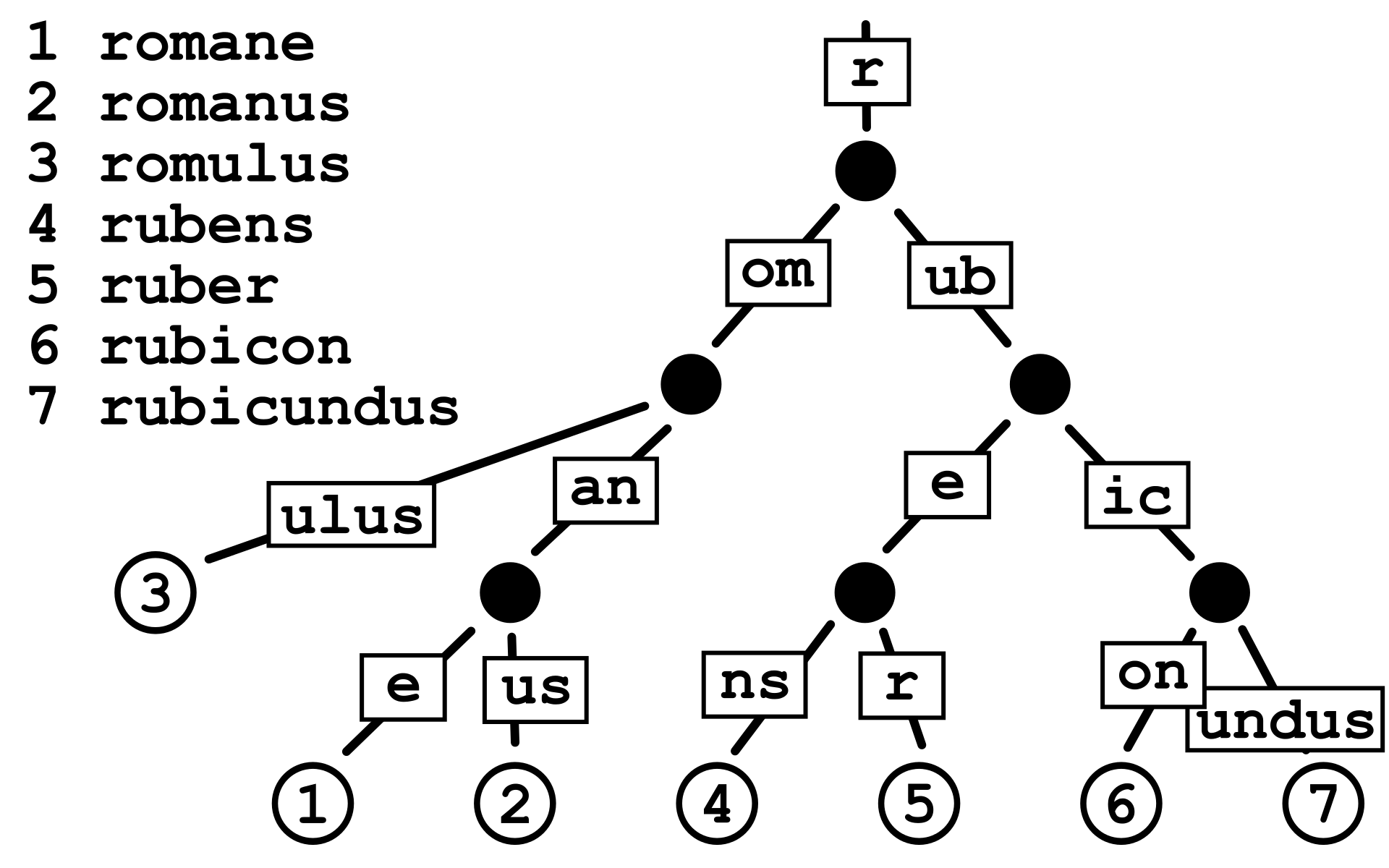
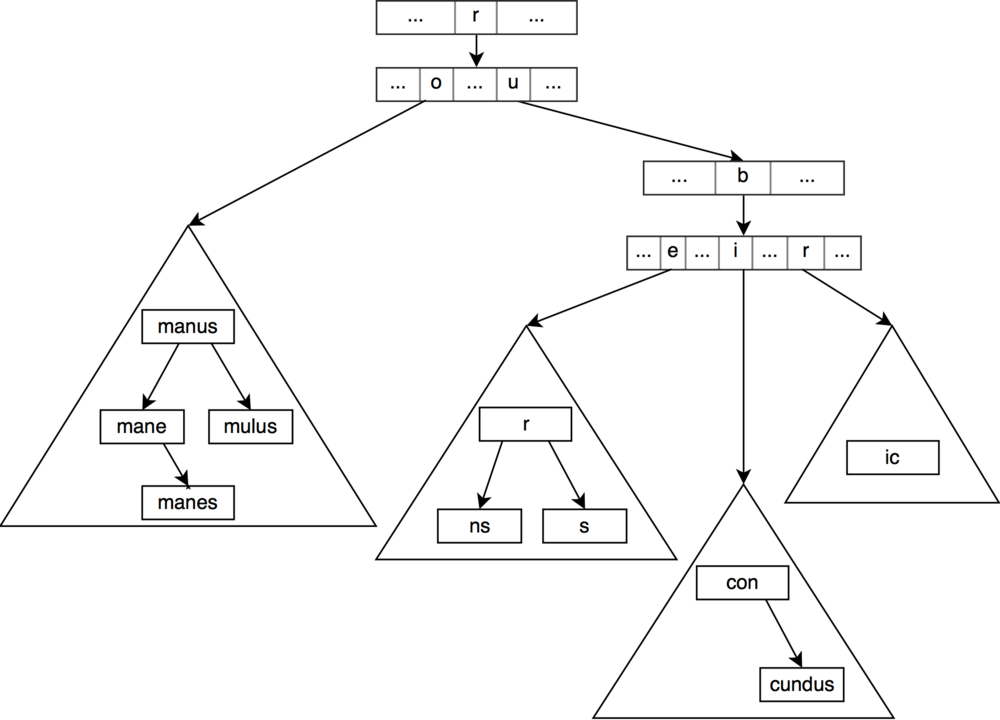
例如,我们用键集:{"romane","romanes","romanus","romulus","rubens","ruber","rubes","rubicon","rubicundus","rubric"},构建一棵传统Trie:
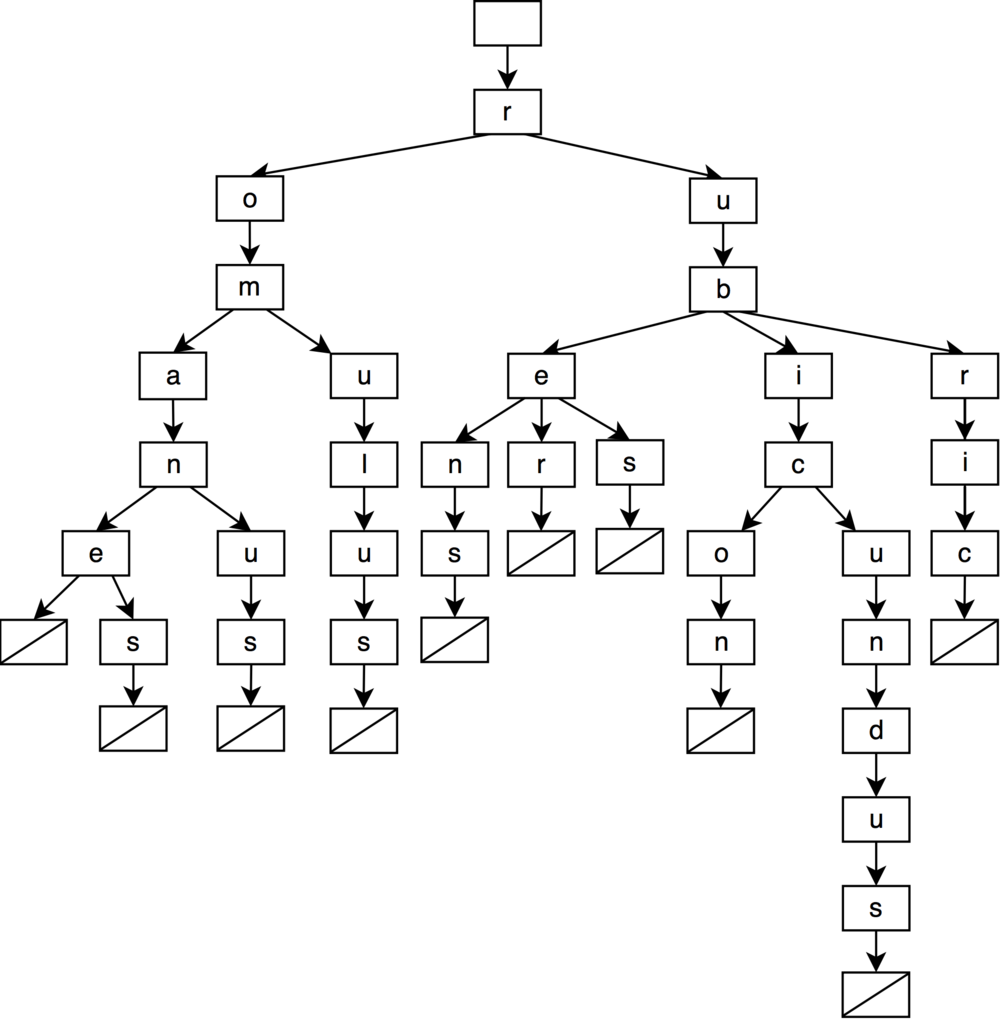
如图所示,从根节点开始,任选一条到叶子结点的树链,这条路径上的字符所组成的字符串对应了集合中的特定键,此树一共有10个叶子节点,分别对应10个键。图中的叶子结点是个哨兵,它不存储任何字符,只是单纯代表字符串的终止。
Trie最基础的应用就是字符串的查找——判断某个字符串是否在字典中。当我们需要查找某个字符串是否存在于key集时,只需要逐字符match,层层递进,如果在遍历到最后一个字符时可以命中叶子节点,那么就代表它存在,否则在中途中任何一步没能match,就代表不存在。
正因为这一典型应用,Trie又叫字典树。实际上,除了判断字符串是否存在,我们还可以在这个基础上,利用Trie做词频统计。只需要在每个叶子节点的值域存储一个计数器即可。词频统计正是Trie的常见应用场景之一。
这样的结构就像是一棵K叉树,我们在检索字符串的过程中,途径每层都在做同一件事:判断当前的父节点是否存在待检索字符所对应的子节点,如果有就递归向下,没有就终止。我们可以发现,具有相同前缀的字符串,它们在树中会共享非叶子节点,相比于用哈希表去存储全量键集,Trie得益于共享前缀的特性,体积的缩小肉眼可见。
哈希表当然可以完成判断字符串是否在字典中的任务,查询的时间复杂度是O(1),这意味着它的查找很快,显然,这是用空间换来的。
相比于哈希表,Trie的查询速度显然劣势,Trie牺牲了时间去换取了大量的空间节省,它的时间复杂度是O(len),其中len表示查询字符串的长度。当然,时间复杂度反应的只是曲线随数据规模增长的快慢程度,真实的查询性能差异需要用具体的键集跑真实benchmark才能知晓。对于Trie树来说,真正影响查询速度的,实际上有很多因素。另一方面,我们总说相比于哈希表,Trie树更省空间,那么究竟能省多少呢?实际上,这又取决于Trie的具体实现。
状态转移与DFA
实际上Trie的本质是一个DFA(确定有限状态自动机),拆分的键字符可以看作是边,而节点到子节点的过程就是一种状态转移(第i行第j列的值表示在状态i的情况下输入字符j的时候的目标状态)。比如,维基百科对Trie的几何描述图如下:
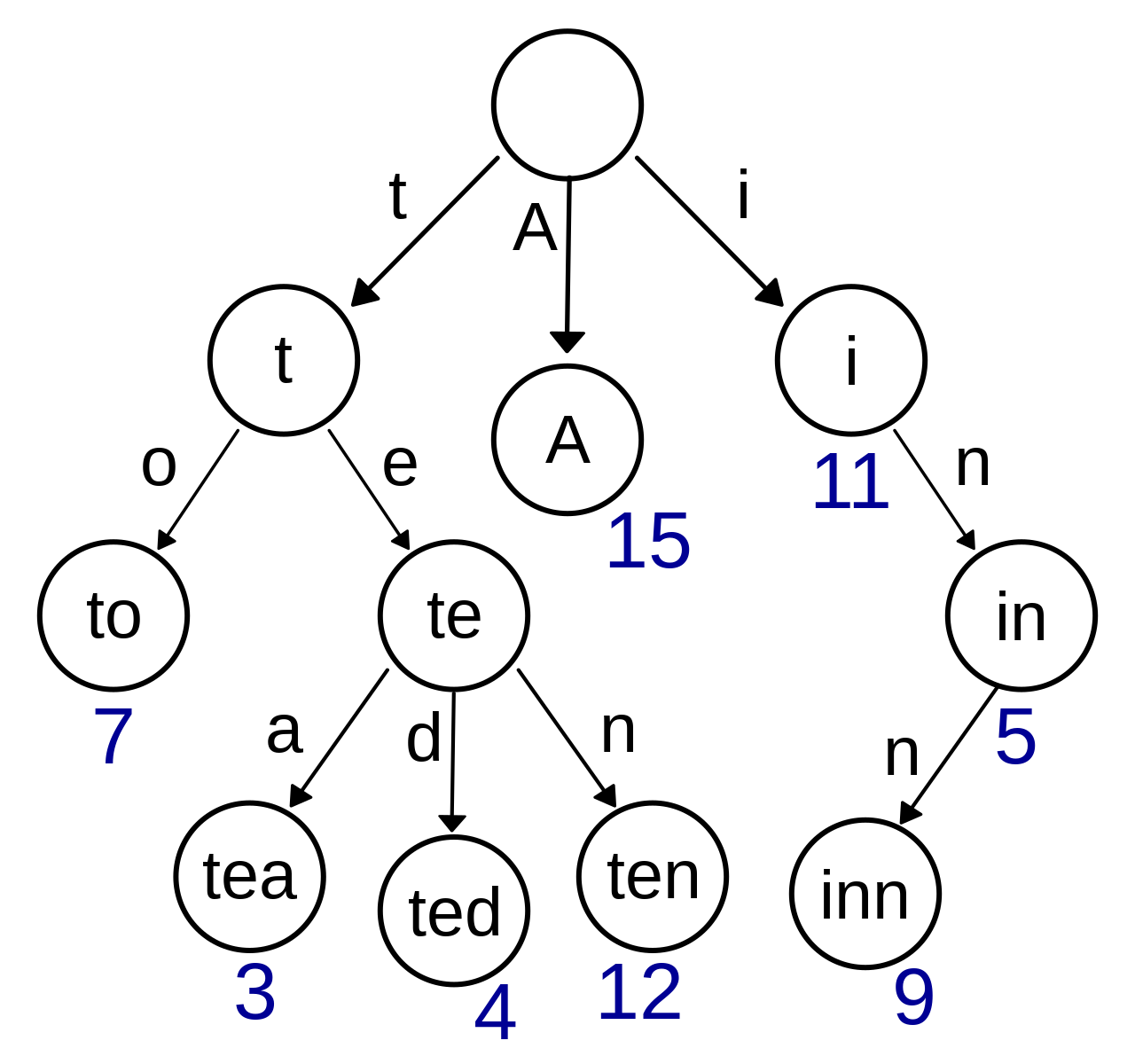
键标注在节点内,边上的字符表示状态的转移,右下角带有数字的节点表示这是一个终止节点(不同于哨兵节点的表达方式,在每个树节点可以用一个标记来代表他是否是终止节点)。另一方面,键实际上不需要显式地保存在树节点中,上图只是为了方便理解Trie DFA的本质而做的演示。
到此,我们就来到Trie树中最核心的问题:每个树节点要如何维护它可能存在的K个儿子呢?K的上限值又是多少呢?
K与字符集
我们先来回答比较简单的第二个问题:K的上限值。
容易想到,K取决于键集中所有不重复字符的数量,因此,最终看的是构成键集的成分。比如,对于全部小写英文字符构成的键集,K就是26;扩展到ASCII,K的上限就是128(实际上很多控制字符一般不会出现)。
而日常需求中,比如搜索联想词场景,构成键集的都是一些中英文混杂字符串,汉字成千上万,如果我们维护万级别的状态转移表,不论采用何种表达方式,都无疑是一场灾难。那么退一步想想,我们平时存储这些中文字符串时,都是如何存储的呢?这取决于具体的编码方式。比如对于UTF8,不同的字符可能需要1~3个字节来进行编码,我们在构建Trie树时可以按字节作为步长来拆分键,如此,K的上限就是256。
举个例子,比如对于键QQ号码,它被UTF8编码为0x51 0x51 0x53 0xf7 0x78 0x01,字符Q占一个字节,编码为0x51,后面的汉字则各占两个字节。当我们构建Trie时,就会形成一条由6个节点构成的树链(不考虑哨兵)。
显然,我们通过编码解决了K可能过大的问题,而代价就是增加了树的深度,速度变慢。实际上,编码只是一种具体手段,它的本质是一种叫做“字母表缩减”的思想,通过控制字母表的大小来限制K的量级,在速度与量级上做trade off。
转移矩阵与链式存储
再回到第一个问题:树节点如何维护它的儿子。
DFA通常用转移矩阵来表示,行表示状态、列表示输入字符,行列共同表示状态的转移。这就意味着树上每个节点都要维护一个规模为K的数组,此时构成的Trie如下图:
1 | |
这种稀疏数组的实现方式查询效率很高,途径每个节点做查询都是O(1)的时间复杂度,但由于稀疏的现象,空间利用率很低。比如上图中的Trie,对于K=26的情况,仅仅索引4个单词,就消耗了肉眼可见的空间。
当然,我们也可以放弃稀疏数组,采用链式来表示状态转移:
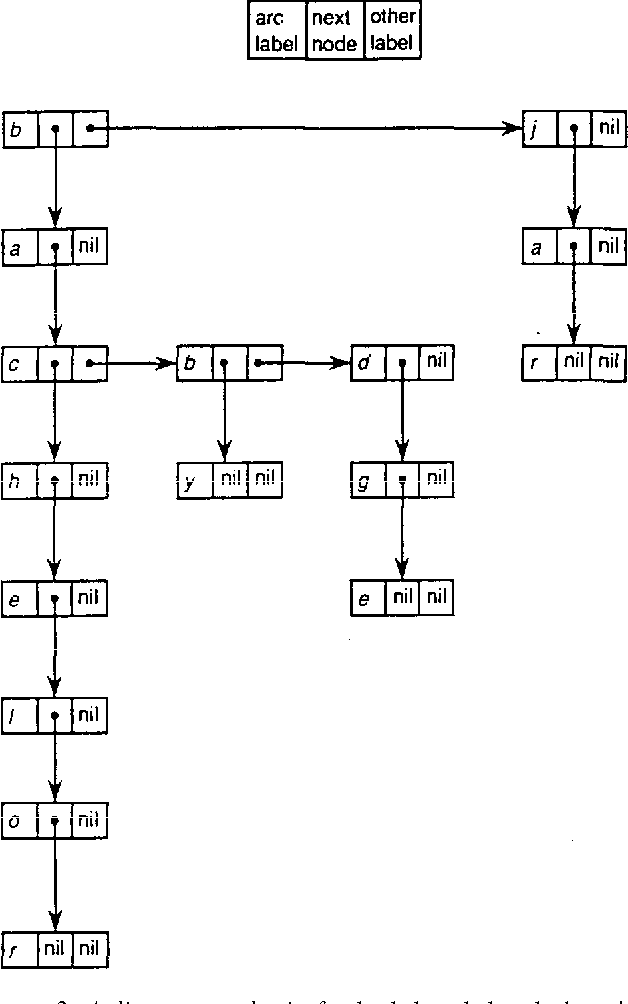
1 | |
无需K规模数组,每个节点只需要保存两个指针即可:一个指向兄弟(sibling)、一个指向儿子(children)。这下彻底稠密了,空间利用没有丝毫的浪费,但代价就是每个节点的状态转移都需要做一轮线性查询,即O(K)的时间复杂度。此时,字典树的查询时间复杂度变成:O(K*len)。
我们从一个极端,步入了另一个极端(我叫二极管(bushi))。
Trie空间优化之道
那么,有没有什么折中的方案,让我们既能节省空间存储,又能兼顾速度呢?
答案当然是有的,而且是八仙过海,各显神通。
字母表缩减大法
最容易想到的就是利用上一节中提到的字母表缩减大法:我们可以按比特来拆分,比如以4bit-16字符的字母表来替代8bit-256字符的字母表,空间存储变为了原本的1/16,代价是树的深度增加一倍,查询耗时变为原本的2倍。
本质上来讲,这是基于转移矩阵方案,通过平衡字母表大小与树的深度来二者兼顾。
关联容器
另一种简单的方案是改用关联容器,把字母编码单元映射到一个子节点:
1 | |
如此,每个节点只需要按需存储转移状态,减少稀疏。关联容器可以选择二叉搜索树、有序数组或是哈希表。
- 比如
std::map是一种平衡搜索树(红黑树,本质上是2-3-4树),查询时间复杂度为O(logK)(二分查找)。若选用std::map来存储状态转移路径,则字典树的查询时间复杂度为:O(len*logK)。 - 再如
std::unordered_map是哈希表,查询时间复杂度为O(1),相比于搜索树,它的性能是用空间的稀疏换来的。若选用std::unordered_map来存储状态转移路径,则字典树的查询时间复杂度为O(len)。
本质上来讲,这是通过在Trie节点的微观设计上,用关联容器取代顺序容器而做的平衡。
树链压缩
前面的两种思路都是对单个节点的大小下功夫,我们可以换个角度,去尝试减少树的节点个数。观察一开始我们构建的Trie树:
可以发现其中有很多单一路径,既然是单一路径,那就可以应用链压的思想,对单一路径进行整合,变成:
核心思路也相当直观:
- 懒生成:在构建Trie时,对于插入的字符无需新建节点,而是累积到现有的键上。
- 按需分裂:当插入时遇到了有多个儿子的情况,再分裂出两个儿子节点,改写键值。
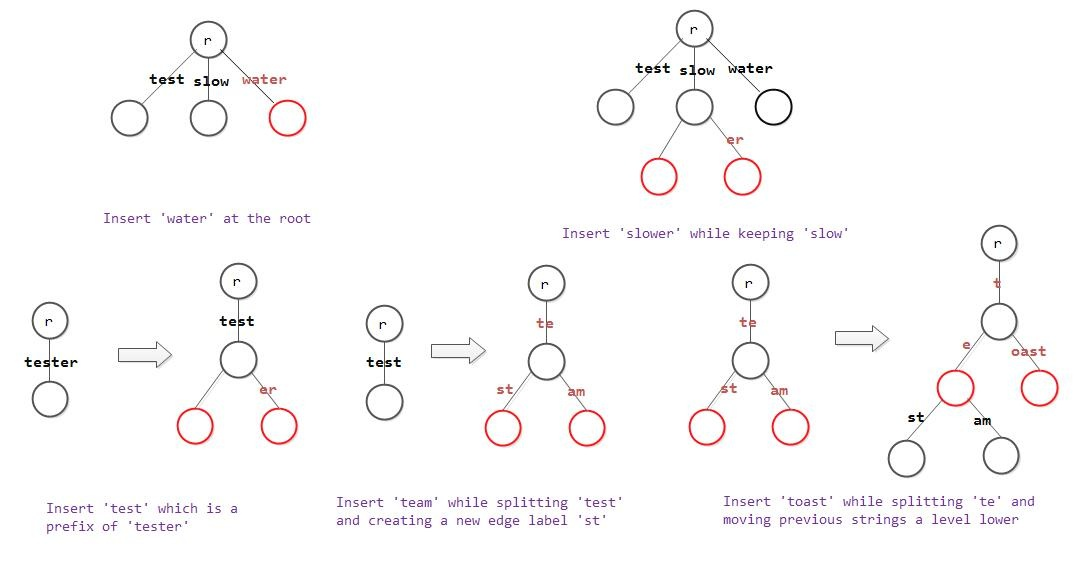
链压的思想非常广泛地应用于各种数据结构。而在Trie上的应用所产生的数据结构,一般被称为Radix Tree,中文名叫基数树,它也叫压缩前缀树、基数特里树:
实际上基数树可以理解成一种广义Trie树,它的存储方式和传统的Trie不一样,我们在后文介绍特里树时会提到这种按bit来表达的存储方式。这里限于篇幅,就不对Radix Tree继续展开。
Trie实现体的奇思妙想
以上都是比较常规的优化手法,事实上,在Trie发展的历史长河中,还诞生了诸多奇思妙想的Trie实现手法及其变种。接下来,就让我们逐一欣赏大神们的设计。
Partricia树
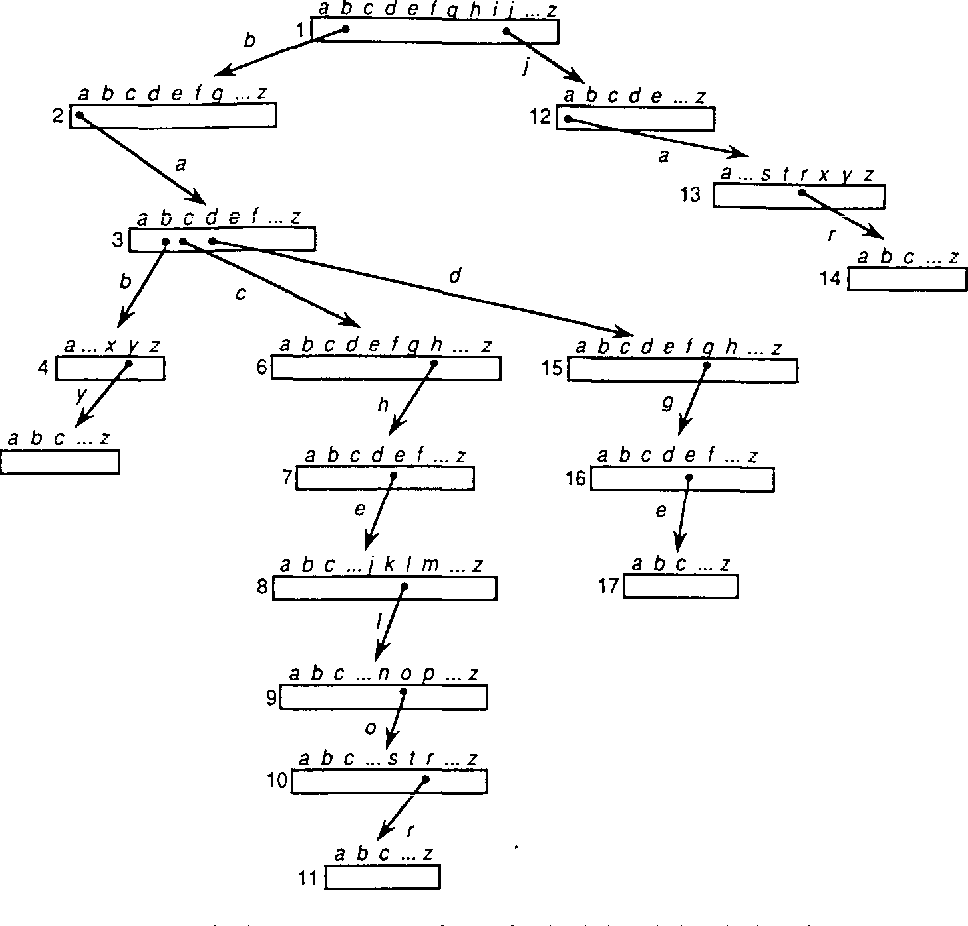
Patricia树,中文名叫特里树,是压缩二进制Trie的一种特殊实现,它在其表示中利用字符串键的二进制进行编码。树中每个节点都包含一个索引,称为“skip number”,它存储节点的分支索引,以避免遍历期间出现空子树。
例如,由{in,integer,interval,string,structure}构成的Partricia树如下所示:
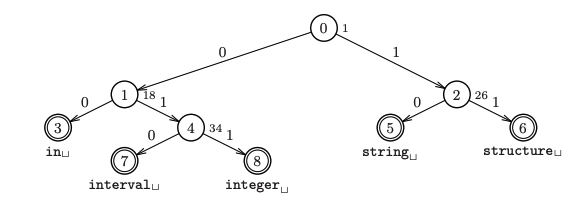
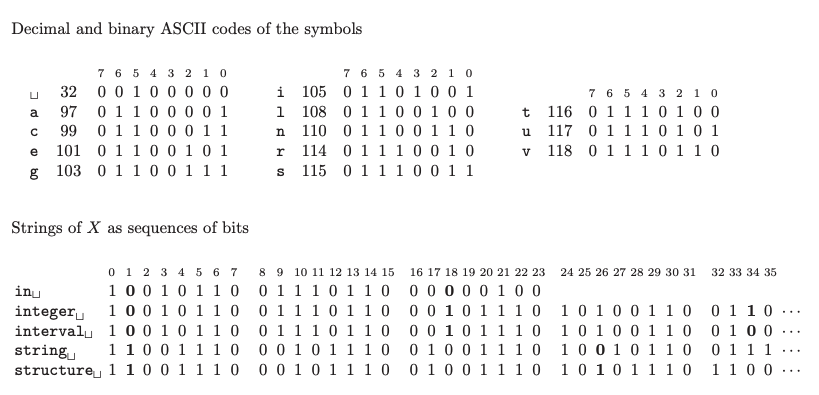
与节点相邻的每个索引值代表"skip
number"——即要决定分支的位的索引,比如string,structure的bit序列从idx=1开始与int,integer,inteval有所不同(前者是1而后者是0),故根节点(0号节点)记录"skip_number=1",string,structure出现在右子树,int,integer,inteval出现在左子树。而对于1号节点,它的"skip_number=18",这是因为从第18位开始,in和interval,integer有所区别,故在此处分道扬镳。
Critbit Trie
CB Trie是Partricia树的Bitwise变种。Bitwise是一种特殊的Trie,可以携带一个bitmap,来高效的按位表示哪些分支是有效的。
Critbit Trie全名——Critical Bit Trie,critical bit表示两个串的共同前缀分叉之处的比特。以下我们简称CB Trie。它包括两种类型的节点:
- 中间节点:存储critical bit的位置,以及左右两个子树
- 叶子节点:存储整个串
1 | |
掩码的存在加速了分支的查找,可以通过newotherbits = p[newbyte] ^ ubytes[newbyte];来快速取得不同的最高位,最终决定是往左还是往右。
此外,如何知晓节点node是一个叶子节点,还是中间节点呢?CB
Trie的设计上看起来并没有预留这样一个标志位。实际上,由于指针有按x字节(取决于处理器位数,32位是4,64位就是8)对齐的特性,因此指针的最低位一定是0,本着最大程度利用的原则,CB
Trie在设计上用child的最低位来做标志,0表示叶子节点,1表示内部节点,比如,查找的代码如下:
1 | |
CB Trie的更多内容可以关注:https://cr.yp.to/critbit.html
除Critical Bit Trie外,还有一种与之类似的QP Trie,详见:https://dotat.at/prog/qp/README.html
Burst Trie
Burst Trie严格意义上已经不是字典树了,它是字典树的变种(我更愿称之为混血)。它与字典树的主要区别在于,它的叶子结点和中间节点采用了完全不同的数据结构。中间节点依然是常规的Trie节点,但叶子节点被替换成了一个容器:
容器本身可以选择各种各样的实现方式,比如上图中使用了二叉搜索树(生产环境肯定是用具有平衡能力的搜索树,比如红黑树、AVL或者伸展树)。除了二叉搜索树以外,我们当然也可以用链表、哈希表来作为容器。无非就是在时间与空间上做平衡罢了。
那么问题来了,在Burst Trie的构建过程中,何时应该分裂出叶子节点和中间节点呢?
Burst Trie以一个空容器作为起始态,每当新元素插入时,容器的规模随之增长,直到容器被爆裂启发器(burst heuristic)判定为低效时,容器节点发生爆裂:容器节点先创建一个字典树中间节点,取代自己原本的位置,对于容器中的每个元素,以首字母作为新节点,除首字母外剩下的字符添加到新容器中,新容器作为新节点的子节点。如此,一个容器当触发启发器时,就会爆裂成多个容器,并生成一个新的中间节点。这个过程会递归下去,直到全部新容器都满足爆裂启发。
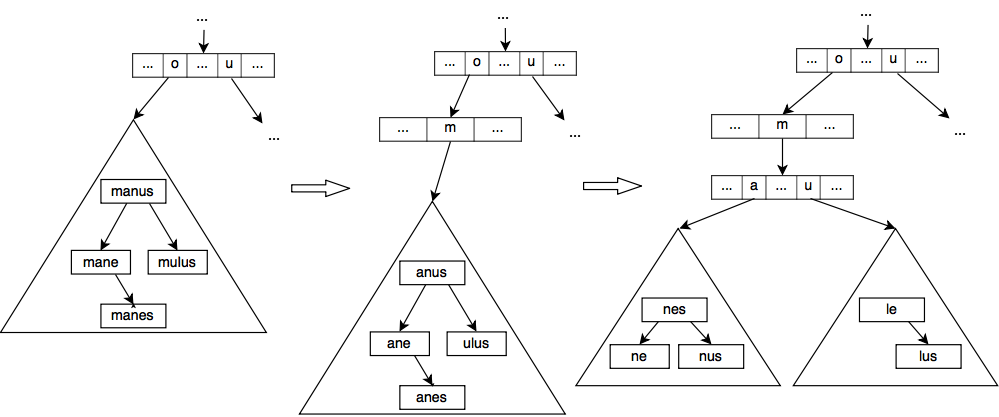
上图为增加单词romule触发了爆裂启发器后的爆裂过程。
既然是启发式策略,那么我们应该如何设计这一策略呢?一般来说,有三种常见手法:
- 阈值:最为简单粗暴的手法,只要容器中元素个数超出了阈值,就发生爆裂。
- 比例:每个容器记录两个计数器,N表示容器被查询的次数,S表示命中容器中根节点的查询次数(也就是一发入魂,到访问到根节点即止)。当S/N低于某个阈值时,容器就会破裂。
- 趋势:创建容器时,分配给容器一个资源量C。每次成功访问时,都会修改资源量。如果访问是直接命中,则增加B作为奖励,否则减少M作为惩罚。当资源量达到0时,就发生爆发。
比例和趋势这两种策略,对于容器的数据结构选用像是伸展树(Splay树)时会更加契合,Splay树会将被频繁访问的节点上移到靠近root的位置,对于不均匀查询的业务场景,选择伸展树会非常有用。
Burst Trie这类混血型数据结构,相当于解除了Trie本身结构的限制,彻底放飞自我,直接用不同的数据结构杂糅来做时间与空间上的trade off。
HAT Trie
HAT Trie是一种Burst Trie,它选择用数组型哈希表来作为容器节点的数据结构。
何为数组型哈希表呢?这个就要从哈希表的碰撞谈起。我们知道哈希表是把不同的元素通过哈希函数(比如,通过最简单的模运算(一般选用一个大质数))分配到不同的桶当中,然而,总会有不同的键被哈希到相同的桶的情况,那么怎么解决碰撞冲突呢?虽然方法五花八门,但是在生产环境中最常见的解决方案就是——拉链法。即,每个哈希桶都包含一个链表,当发生碰撞时,将新元素插入到链表末尾。
当然,哈希桶也可以用别的结构,比如Java最新的HashMap就用的红黑树。本质上也是时间与空间的tradeoff。
这种简单的拉链法非常好用,但它的主要问题在于对cpu
cache不友好(链表中不同的节点它们在存储空间上未必连续,cache
line无法一次性装载)。比如C++的std::unordered_map<std::string, int>,当访问链表中的每个节点时,我们需要进行两次解引用操作:一次用来访问下一个节点,一次用来比较自身是否相等。
数组型哈希表则是在拉链法的基础上进行了改造,他把桶中的所有字符串统一存放在一个大数组当中,而不是由链式管理:
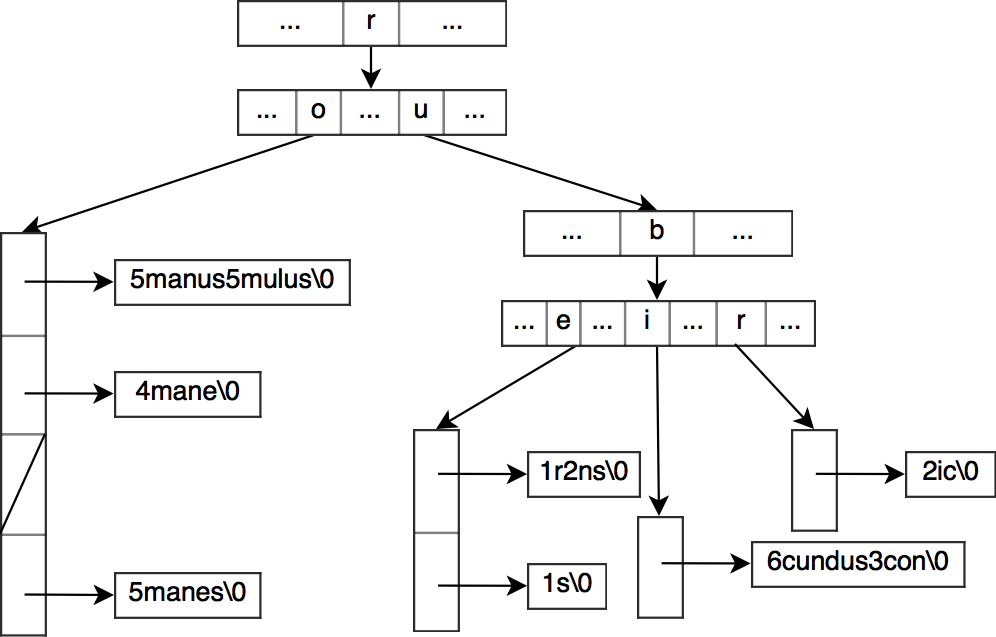
通过合理的元信息分隔符来管理每一个子串(比如上图中用长度来管理)。另一方面,这一设计也节省了next指针的空间,当然缺陷就是数组的规模会随着字符串的增加,而面临重新分配内存的需求。
此外,HAT
Trie对于爆裂的实现还有一些额外的补充:如上图所示,中间节点的不同字符可能存在相同的子容器节点。e和i都指向了同一个数组哈希表。出现这种现象是因为HAT
Trie的混合爆裂方案:
- 容器节点有两种形态,一种是单一型,另一种是混合型。
- 混合容器节点可以拥有超过一个的父节点。
- 当从单一节点创建多个混合节点时, 需要寻找一个分隔字符,它能尽可能平均的把单一节点分为两部分:所有首字母小于分隔字符的字符串进入左边的混合节点,其他的进入右边的混合节点。
- 然后,父节点会对小于分隔字符的字母设置指针指向左侧混合节点,剩下的指向右侧混合节点。注意不同于单一节点, 我们在容器中会保留原字符串的首字母,以便于分别出来自于哪个父节点.
HAT Trie在设计上也是有明显缺陷的,它的问题在于元素只是近似有序,容器节点中的元素是无序的。这也就意味着,当我们在进行前缀查找时,可能会遭遇两种情况:
- 当查询像是
ro时,在向下遍历的过程中,r和o都有中间Trie节点,它的查找和Trie没有什么不同。甚至当我们需要拿到以ro为前缀的所有字符串时,效率上还会大大增加,因为r->o的容器子节点上的数组型哈希表里的所有元素,都是我们需要的结果,这就可以一次性打包返回。 - 而当我们需要查找
roma时,在向下遍历的过程中就遇到了麻烦。由于Trie中间节点只到r->o就中断了,我们不得不在下面的容器节点里进行一次线性的遍历。这一时间复杂度则取决于哈希表的大小上限。
总的来说,HAT Trie在面对短查询前缀请求比较多的场景,在速度和内存占用方面有着相当的优势,在后文也可以看到我们进行的性能评测数据。
关于HAT Trie的实现,可以参考:https://github.com/Tessil/array-hash
Double Array Trie
回到一开始提到的Trie本质——DFA,而使用转移矩阵实现的Trie,尽管效率上非常优秀,但空间因其稀疏性造成极大浪费。那么有没有什么办法可以直接压缩这个转移矩阵呢?
事实上,早在1975年,Johnson前辈就提出了用4个数组(default,base,next,check)来表示DFA的方法,可以极大的减少空间浪费。而对Trie来说,可以精简到3个数组,此时,状态转移表的行以重叠的方式分配,使得空闲的单元能够被其他的状态利用,从而减少空间浪费。在1989年,研究者Aoe又提出了3数组表达方式的另一种改进,使得可以仅用两个数组(base,check)来表达Trie树。
Triple Array
先来看三数组的Trie实现,三数组Trie由以下三个数组构成:
- base数组:每个元素都对应Trie中的一个节点。对Trie中任意节点
s,node[s]表示该节点在next和check数组中的起始索引,该索引表示节点s在状态转移表中的行号。 - next数组:与check数组协同。Trie中每个节点的状态转移向量存储于next数组中。
- check数组:与next数组协同。用来标记next数组中的元素所属的Trie节点。
next和check的关系如下:
- 状态
s在输入字符c时,目标状态为t,那么有:check[base[s]+c] = snext[base[s]+c] = t
形成的关系如图所示:
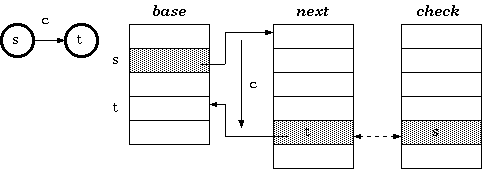
可以看到base数组指向特定的next数组单元格,而next数组单元格存储的是一个基地址,配合偏移量c最终找到目标状态单元格,而该单元格内存储状态t。
状态
s不是字符"s",它代表Trie中任意一个节点,也就是某一个前缀字符串。t同理。
根据这样的关系,当我们在find过程中从s去找输入c后的下一个状态时,即可按部就班:
1 | |
但是这种设计不得不面临一个问题:在建树过程中,每次遇到状态转移,都得保证next[base[s]+c]这个地址单元可用(即没被此前的操作占用)。如果地址可用,那么就可以心安理得的直接占用;但如果已经被占用了,那么就不得不进行一番腾挪:移动当前单元格所有的节点,或者对节点s的转移向量重新调整位置。具体执行哪一种操作,需要根据代价来权衡,在找到了空闲的新单元格后,还需要对转移向量重新计算,算法如下:
1 | |
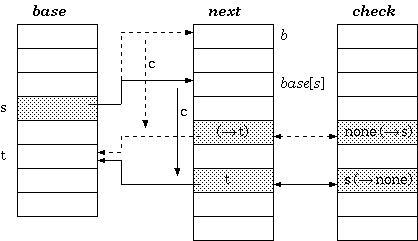
从本质上来讲,三数组表达方式,实际上是通过next和check的协同,来允许相邻的存储单元存储不同的节点。这一思想可以大大降低被浪费的单元格的占比,使得空间利用更加紧凑。当然,代价就是每次新增状态转移时,都可能和现有的内存布局发生冲突,此时就不得不花大力气腾挪。
Double Array
正如上文所述,日本研究者Jun-ichi Aoe精益求精,在1989年提出了进一步的简化:双数组Trie树,简称DAT。
双数组结构中剔除了next数组,把next的功用直接合并到了base数组中,此时base和check数组平行。base和check的关系如下:
- 对状态
s,输入字符c,转移到目标状态t。有:check[base[s]+c] = sbase[s] + c = t
此时,base数组的value不再指向next数组,而是指向base自身其他的单元格:
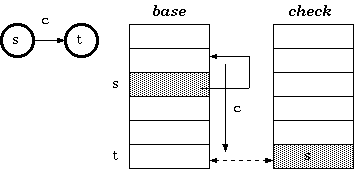
相比于三数组Trie,双数组Trie优化掉了对next数组索引的存储,next与base合为一体,不再对这一”缓冲池“的元信息加以记载,从而又节省了一大笔空间。
根据这一关系,find操作的伪算法改写如下:
1 | |
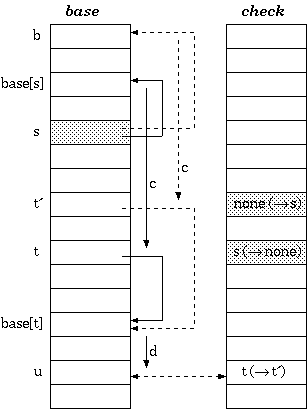
当然,双数组Trie和三数组Trie一样,都会面临卡格子的问题。只不过,对于双数组结构来说,这回被卡主的格子在base数组中。解决的方法也与三数组结构如出一辙,无非是向后扫描+转移状态重定位罢了:
1 | |
搬迁过程如图所示:
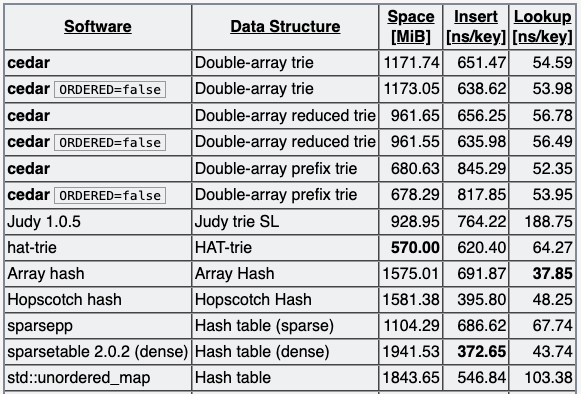
DAT的开源实现库有很多,最著名的是小日子依照DAT论文写的darts-clone,但darts-clone实际上只是个验证demo,并未达到工业级实现的标准。其中表现最优的是:cedar,原作者在安利cedar时,也曾对主流的Trie开源库进行了性能评测,这些Trie的实现包罗了前文介绍的种种手法。
无序键集建Trie:
对有序键集建Trie:
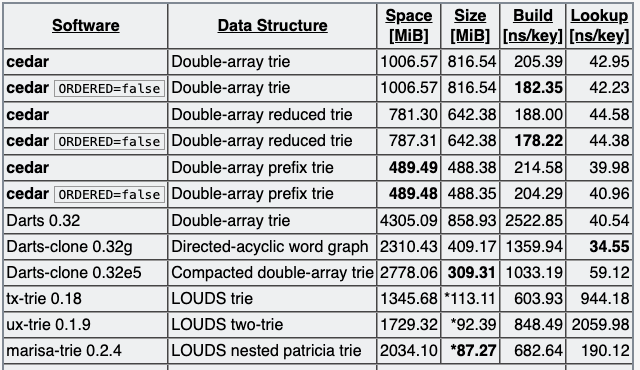
可以看到在DAT的实现中,cedar实现的Double-array prefix trie,在空间占用、构建时间和查询性能上有着最好的权衡。
Benchmark
实验组1
我挑选了工作当中联想词的一部分Query集合,共约720w,它们都是些中英文数字混杂的字符串,诸如:
1
2
3
4
5
6
7
8
9
10
11
12
13朝阳区体育场占地面积
你为什么要当警察
巫师约伯
原神风神曈的分布
王战小说主角
6个月的狗咬人会得狂犬病吗
桉槎
醉鹿g65参数
美食大陆8王
算命的说我静不下来
拍打全身后放的屁特别多特别臭
沙县淘金山海拔
...
我挑选了上述介绍的几种Trie实现库中,比较典型的三位:cedar的DAT、tsl的hat-trie以及critbit-trie。同时,我们还用标准库的std::unordered_map作为基石对比。
我编写了一个测试程序,用来输出这样三组信息:
- 构建Trie的耗时以及空间占用(物理内存)
- 遍历精准查找所有720w queries的耗时。
- 我设置了一个比例参数
rate,按照比例来筛选出n*rate个queries参与构建Trie。 - 此举是为了模拟生产环境中,会有一定比例的字符串查无此人的情景。
- 我设置了一个比例参数
- 从720w
queries中挑选出1w条,按照UTF8字符做步长,分别切出5个前缀字符串。
- 比如,对于"醉鹿g65参数",得到"醉","醉鹿","醉鹿g","醉鹿g6","醉鹿g5"。
- 对这些前缀字符串执行”寻找以该字符串为前缀的所有字符串“操作(也就是find+travese)。
- cedar和critbit的库实现上,对于这一操作支持截断,这里可以通过修改参数来设置截断上限。而tsl库返回的是一对头尾迭代器,可以自主后置截断。
以下是我设置了rate=0.8,cut_number=1000的运行结果:
1 | |
| 索引库 | 索引量级 | 构建耗时(ms) | 精准匹配耗时(ms) | 前缀匹配耗时(ms) | 物理内存占用MB |
|---|---|---|---|---|---|
| std::unordered_map | 5,759,407 | 2984 | 1586 | NA | 321.25 |
| cedar::da | 5,759,407 | 5103 | 4098 | 3902 | 310.45 |
| tsl::htrie_map | 5,759,407 | 4047 | 2375 | 1487 | 221.54 |
| critbit0_tree | 5,759,407 | 10966 | 14071 | 966 | 420.86 |
注:这里每种数据结构的物理内存占用都抛除了用来保存原始query的std::vector<std::string>容器大小(521.30MB)。
从benchmark可以看出,tsl::htrie_map的性价比最高,他对空间的占用最省,且在精准匹配耗时和构建耗时上都很快。critbit0_tree在构建和精准匹配耗时上都非常慢,且内存占用最多,但它在前缀匹配耗时上表现最好(前提是按1000进行截断)。cedar::da则表现中规中矩,可以看到这种基于double-array实现的紧凑型Trie树,在时间和空间上都有不错的表现。另一方面,tsl::htrie_map的表现如此亮眼,这也和它本身的数据结构更加契合”短前缀查询“这一使用场景息息相关。
700w的数据集说大不大,说小也不小,具体取决于业务。一般在大型分布式系统中,面对的都是十亿、百亿乃至千亿的数据量,当然实际生产环境也不会用单机去构建这么大量级的Trie索引,往往都会前置做分片操作(比如通过哈希函数将数据打散成几百个分片),至于每个分片上的数据量级,就要根据业务需求(比如对耗时的要求)和单机/容器配额的上限(CPU处理能力、内存大小)来权衡trade off。
实验组2
这次我们换成一个1kw左右的数据集,它们比较特别,全部由数字构成。我们通过这组query来模拟一个特殊的场景,数据样例如下:
1 | |
还是以rate=0.8,cut_number=1000来运行:
1 | |
| 索引库 | 索引量级 | 构建耗时(ms) | 精准匹配耗时(ms) | 前缀匹配耗时(ms) | 物理内存占用MB |
|---|---|---|---|---|---|
| std::unordered_map | 8,066,427 | 5198 | 2217 | NA | 486.24 |
| cedar::da | 8,066,427 | 7347 | 5986 | 11721 | 331.11 |
| tsl::htrie_map | 8,066,427 | 8947 | 4105 | 32 | 320.62 |
| critbit0_tree | 8,066,427 | 10571 | 13452 | 2042 | 615.84 |
可以看到,对于这种字符集相当有限的键集来说,tsl::htrie_map和cedar::da在内存占用上都相当节省,所差无几,而critbit0_tree则依然非常臃肿。在精准匹配性能上,tsl::htrie_map和cedar::da都有不错的表现,critbit0_tree则效率比较低,而在前缀匹配性能上,tsl::htrie_map则快得离谱,这主要得益于键集的K较小且是都是短前缀查询(规避了扫表的操作),critbit0_tree在前缀匹配查询上也有不错的性能表现,结合实验1的数据我们不难发现,critbit0_tree更适合做有截断的前缀匹配查询操作。
Trie的应用及其扩展结构
应用场景
Trie具有相当多的应用场景,除了前文提到的全词匹配(比如黑名单命中查询)、词频统计以外,Trie还在很多其他场景有所应用,比如搜索场景的联想词,我们平时用的输入法,都会用到Trie结构来构建前缀索引。


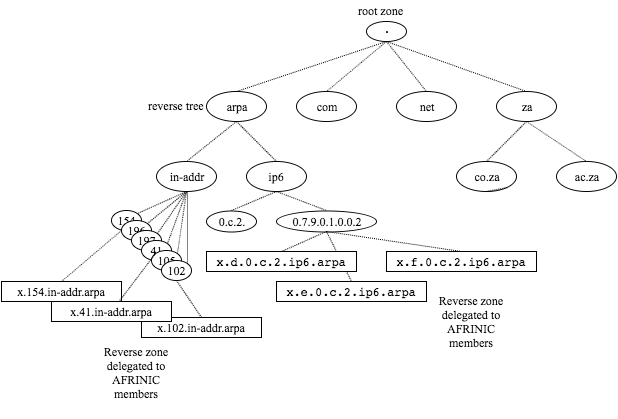
再像是路由场景,比如DNS服务器会对域名和IP地址建Trie索引。linux的路由表、IDR也都是Trie数据结构的典型应用。
扩展结构
一般提到Trie结构时,往往还会提到另外两种数据结构:Suffix Tree(后缀树)和AC自动机。
后缀树
后缀树是另一种数据结构,他主要用来快速解决很多字符串的问题:

所谓后缀就是尾巴,把一个字符串的所有不同长度的尾巴串,全部用来建一颗Trie(严格来说是Radix Tree,因为链压了后缀),得到的就是后缀树。
后缀树可以用来解决回文字符串、两个字符串的LCA(Lowest Common Ancestor)、判断子字符串是否存在等字符串相关问题,在OI中比较常见,比如它可以解决一些用传统手段难以解决的问题:CF235C Cyclical Quest。
AC自动机
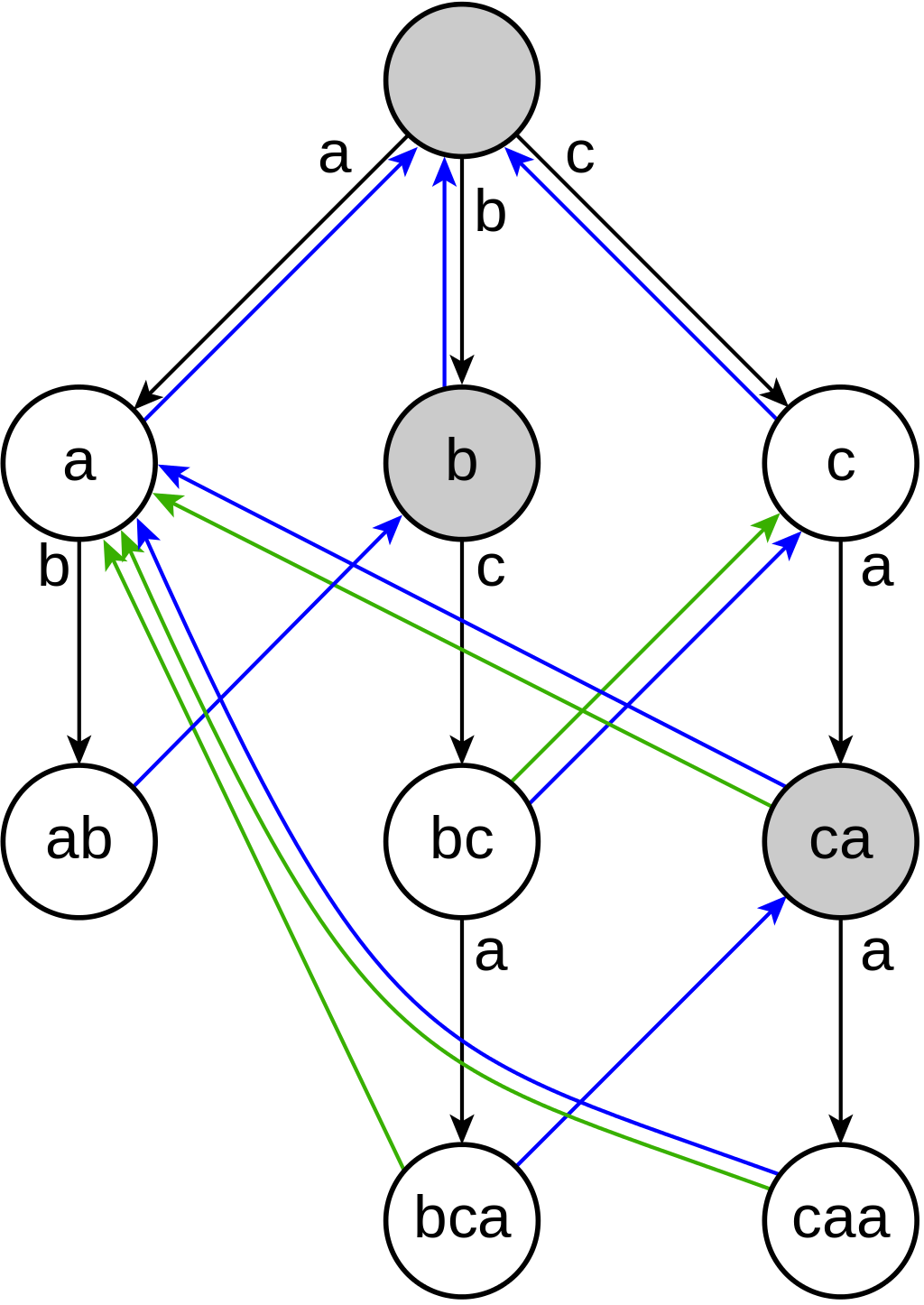
AC自动机是以Trie作为基础结构,利用KMP算法的思想来解决多模式匹配任务的数据结构。
建立一个AC自动机分成两步:
- 所有模式串构建一棵基础Trie。
- 对Trie中每个节点构造失配指针。
所谓的失配指针,就是用来辅助多模字符串匹配中出现fail时,完成向前回溯跳转。而失配指针应该指向哪里,就和KMP的next数组一样令人着迷。AC自动机可以看做是树形KMP:
总结
经过这段时间的恶补,对Trie有了深刻的认知,以后又能嘴硬了(doge)。工作闲暇之余,把研读的相关资料按照自己的理解,萃取出核心思路整理成此文。本着实事求是的态度,也花了些力气自己折腾了benchmark的评测,不可谓不呕心沥血。
从业多年,随着接触的知识和领域越多,越发感觉很多知识背后的机理内核都似曾相识,仔细钻研俱是殊途同归。感到自身渺小的同时,不免心下戚戚然,暗叹一句:吾生也有涯,而知也无涯。以有涯随无涯,die已。